Data collection Locations
Sequences
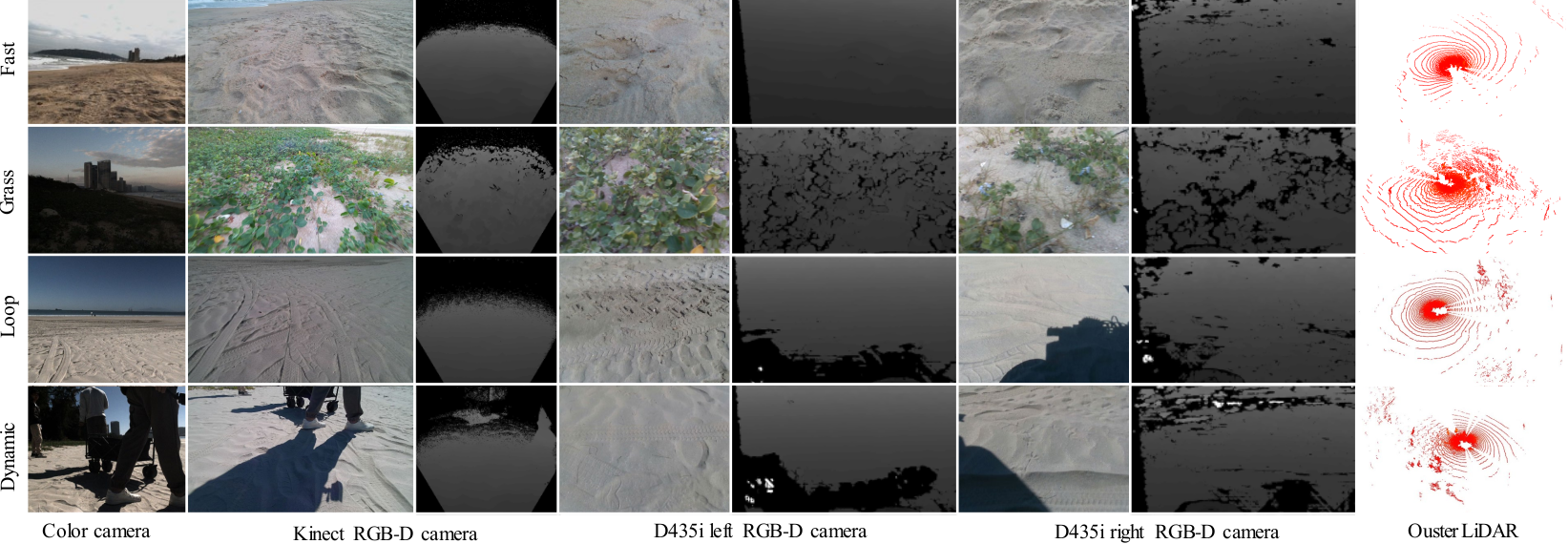
All sequences are obtained within the outdoor sites on the shanhaili and wanke beaches.

The dataset comprises 14 sequences captured in two types of terrains with different robot platforms.

Collected data
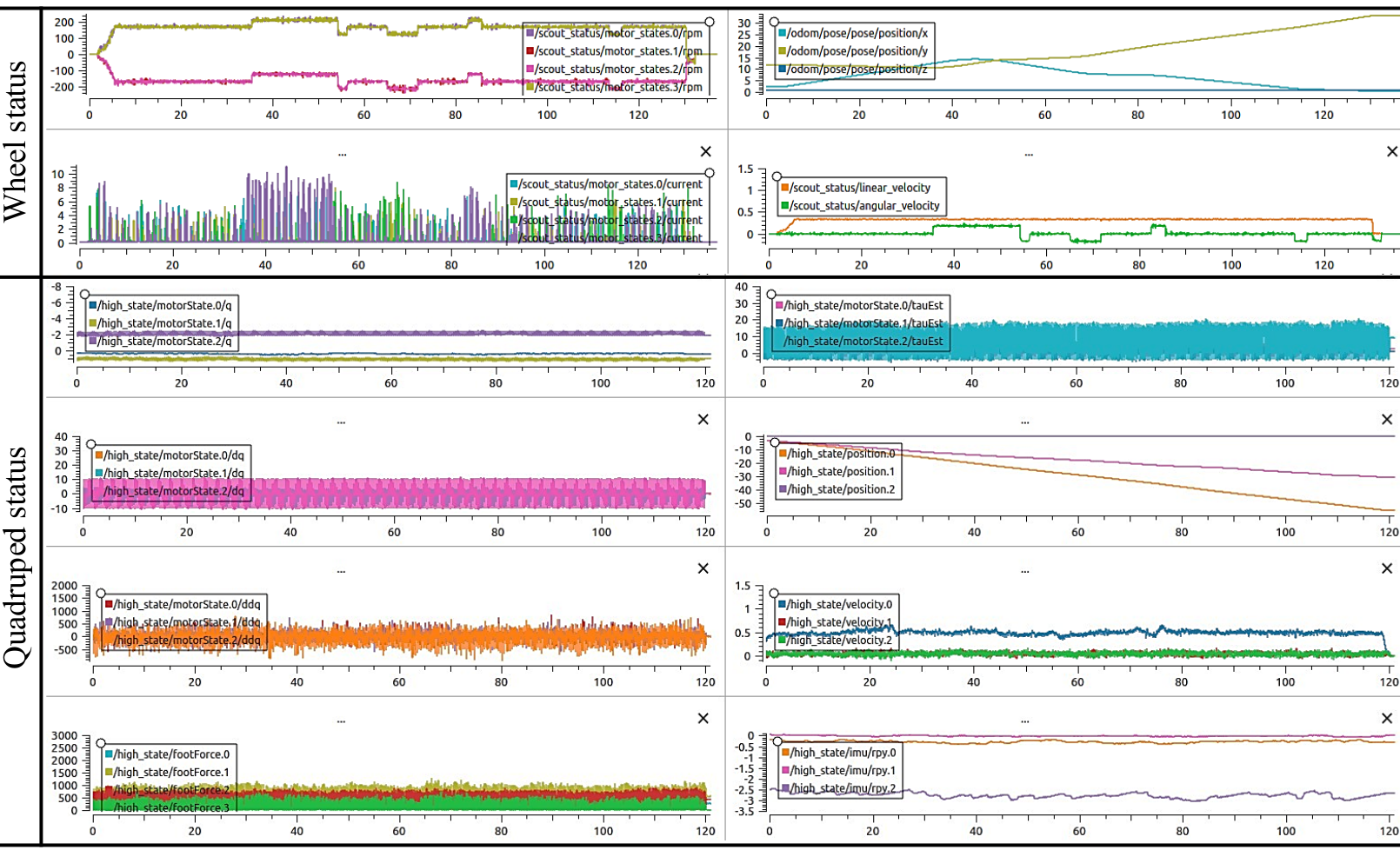
Motion status
Graphs indicate the kinematic status parameters for the wheeled and quadruped robots.