Data Collection Devices
Relative models and supplementary materials of our platforms and sensor suite are provided in this repository: [TAIL-Platforms].
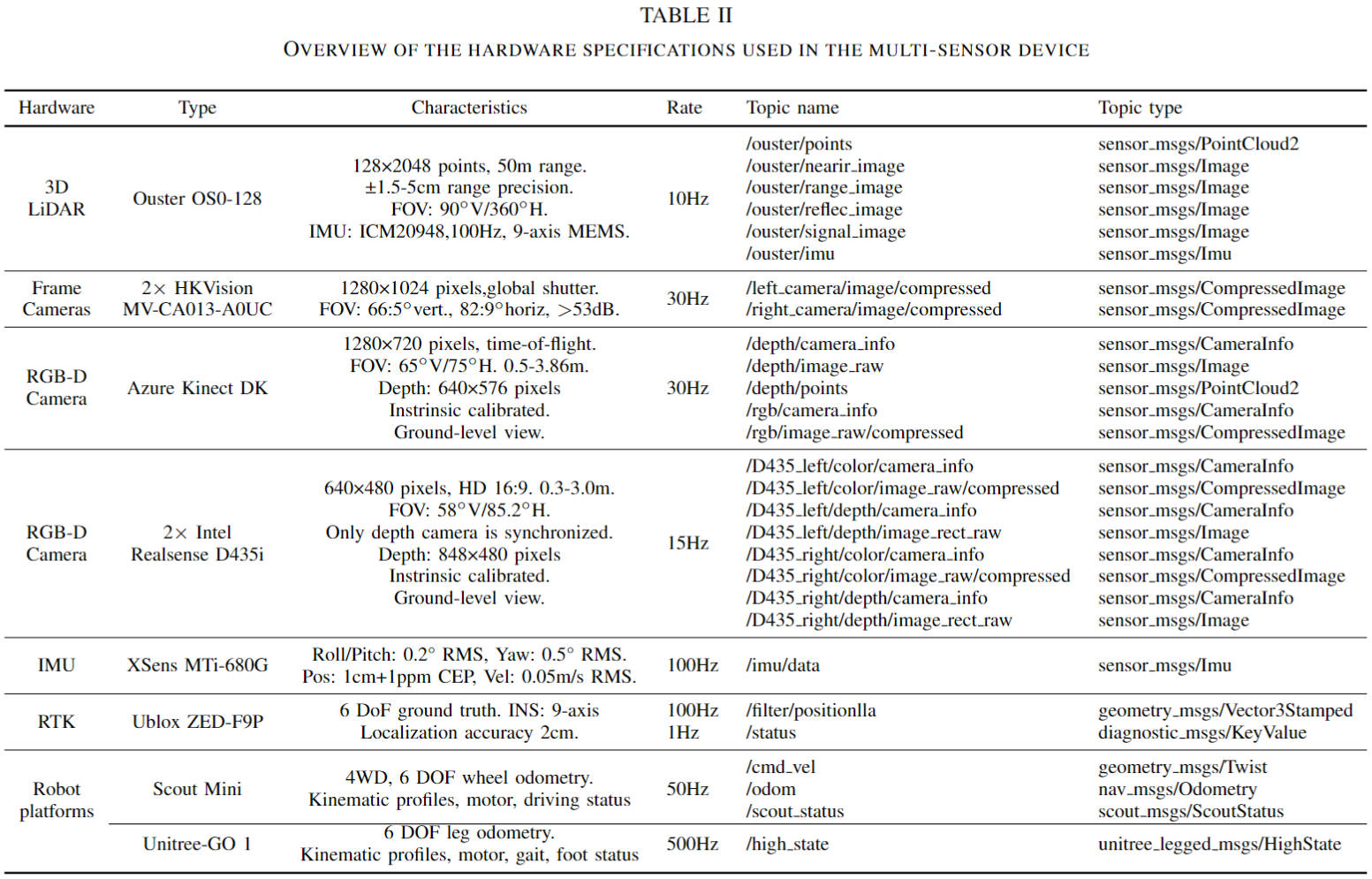
Sensor suit
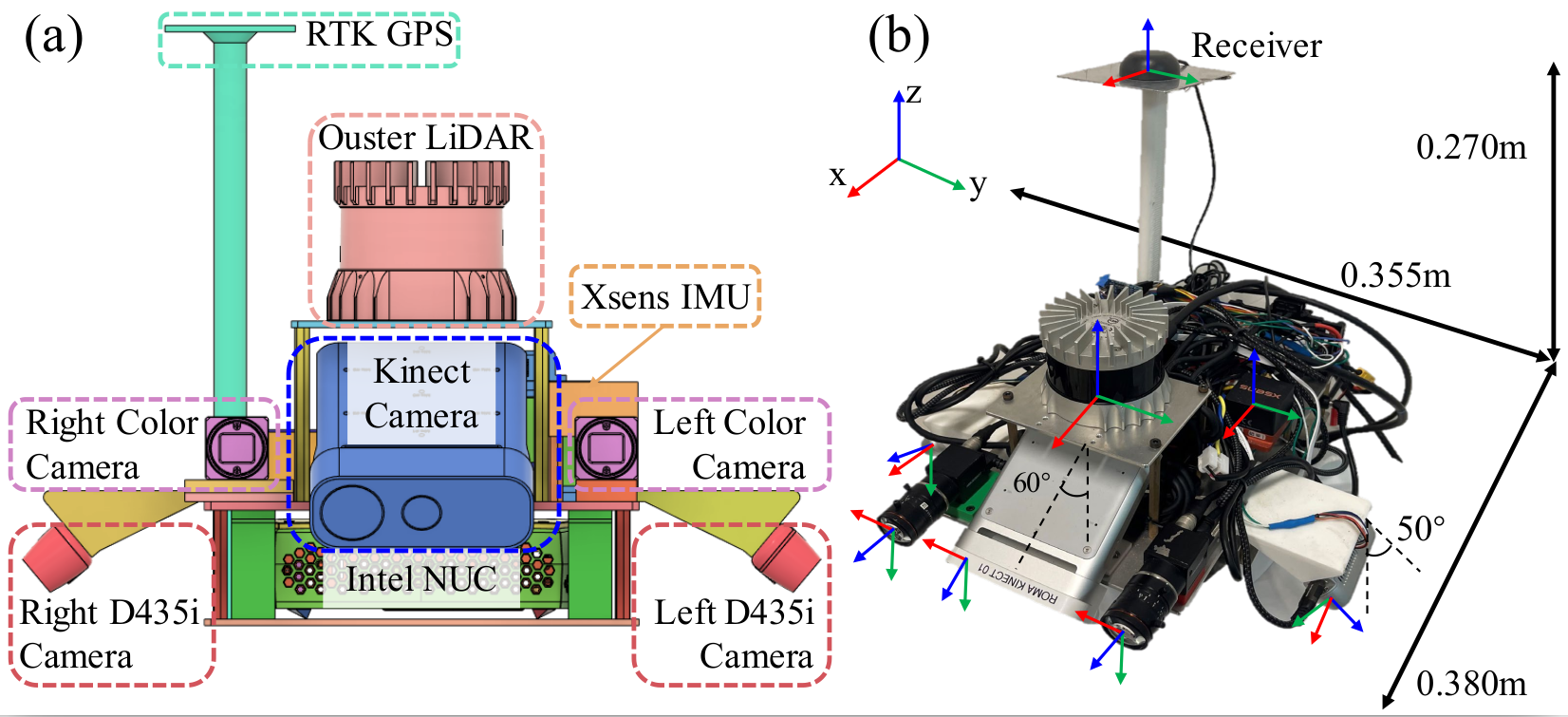
Each sensor and relative characteristics are represented in this table. Specially, tail provide the sensor data from wheel(wheel odom, vel, motor rpm and current) and quadruped robots(leg odom, contact and motor status).
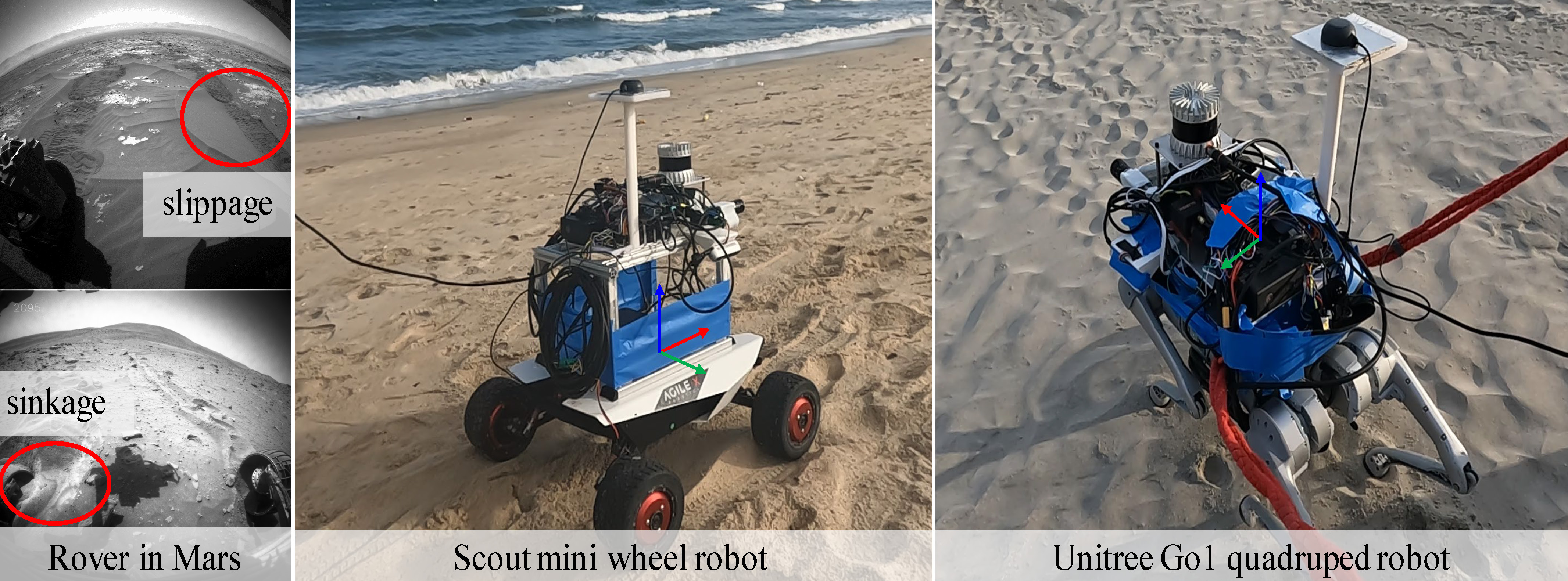
Robots
We utilize wheeled and quadrupedal robots to collect data and set up the compact sensor configuration. They are rugged enough to traverse through challenging terrains to explore more unstructured areas of an environment.
Time synchorization
We propose a hardware-synchorizated method for this sensor suite.

Calibration
- Instrinsics of IMU: Allan Varicance ROS
- Instrinsics of color cameras: ROS camera calibration
- Stereo frame cameras extrinsic: Stereo camera
- Camera-IMU extrinsic: Kalibr
- Camera-LiDAR extrinsic: lidar-camera-calibrator